




产品特点
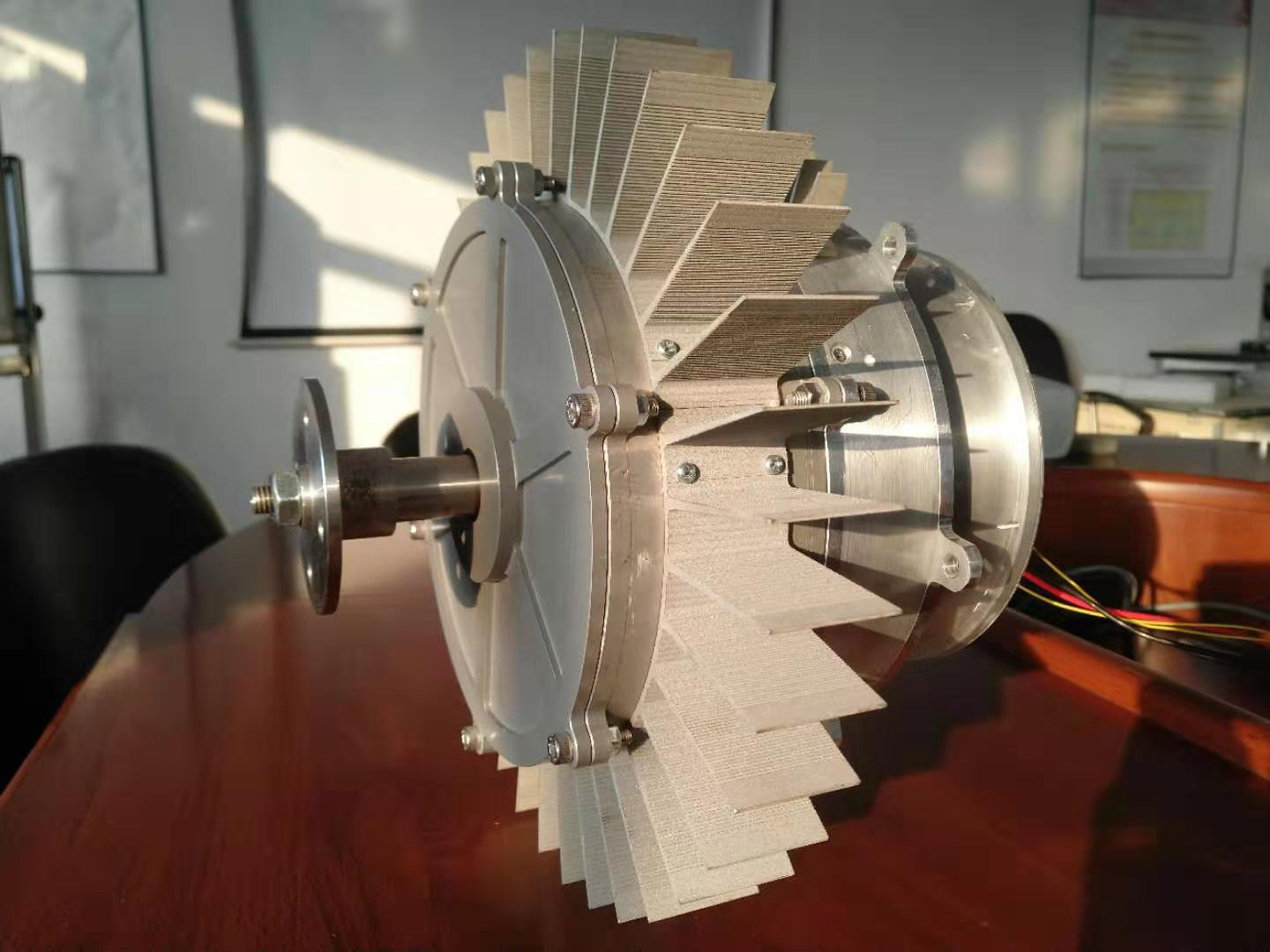
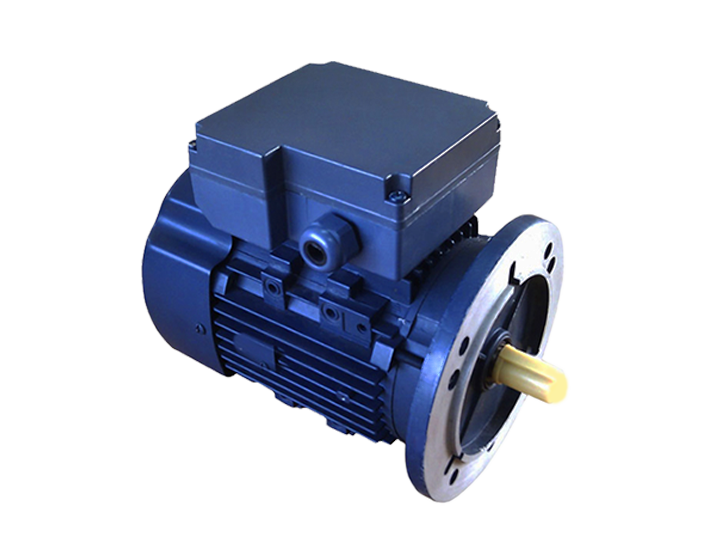
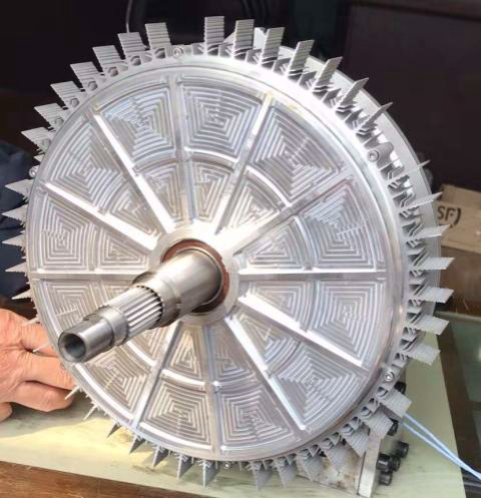
伺服电机、谐波减速器等核心零部件自主开发
采用一体电机等模块化关节,易维护
高速、高精度、高可靠,可按需定制
配备驱控一体的控制系统,支持多种通讯方式
规格参数
| 产品型号 | C21-SF400-1 | C21-SR400-1 | C21-SR600-2 | |
| 轴数 | 3 | 4 | 4 | |
| 安装方式 | 台面/侧挂/吊挂 | |||
| 动作范围 | X轴臂长(mm) | 250 | 250 | 350 |
| X 轴旋转范围(°) | ±140 | ±140 | ±140 | |
| Y 轴臂长(mm) | 200 | 150 | 250 | |
| Y 轴旋转范围(°) ±140 ±140 ±140 | ±140 | ±140 | ±140 | |
| Z 轴行程(mm) | 100 | 150 | 200 | |
| R 轴旋转范围(°) | N.A. | ±360 | ±360 | |
| 重复定位精度 | X、Y 轴(mm) | ±0.03 | ±0.03 | ±0.03 |
| Z轴(mm) | ±0.02 | ±0.02 | ±0.02 | |
| R轴(°) | N.A. | ±0.02 | ±0.02 | |
| 使用环境 | 环境温度 | 0~45°C | ||
| 湿度 | 0-90% RH 以下(不结雾) | |||
| 标准周期时间(s) | 0.52 | 0.52 | 0.48 | |
| R 轴允许转动惯量 | N.A. | 最大 0.01kg·㎡ | 最大 0.01kg·㎡ | |
| 额定可搬运重量(kg) | 1 | 1 | 2 | |
| 最大可搬运重量(kg) | 3 | 3 | 6 | |
| 本体质量(kg) | 17 | 19 | 22 | |
| *测试环境温度 25°C,额定负载时,上下移动 25mm,水平移动 300mm,往返所需时间。 | ||||
外形尺寸

产品应用
SCARA机器人是一种圆柱坐标型的轻量型工业机器人,主要应用领域为电子电气业、家用电器业、食品饮料以及精密机械业的插件、焊接、组装、涂胶、分 拣、移载、堆栈、包装等作业。
















{kind=link}